 Dodawaj ogłoszenia, składaj zapytania, promuj swoją Firmę. Jedno konto w systemie vManager pozwala na zarządzanie usługami
na wszystkich portalach Grupy Vertica.pl.
Dodawaj ogłoszenia, składaj zapytania, promuj swoją Firmę. Jedno konto w systemie vManager pozwala na zarządzanie usługami
na wszystkich portalach Grupy Vertica.pl.

 Dodawaj ogłoszenia, składaj zapytania, promuj swoją Firmę. Jedno konto w systemie vManager pozwala na zarządzanie usługami
na wszystkich portalach Grupy Vertica.pl.
Dodawaj ogłoszenia, składaj zapytania, promuj swoją Firmę. Jedno konto w systemie vManager pozwala na zarządzanie usługami
na wszystkich portalach Grupy Vertica.pl.



13-02-2026, 13:30
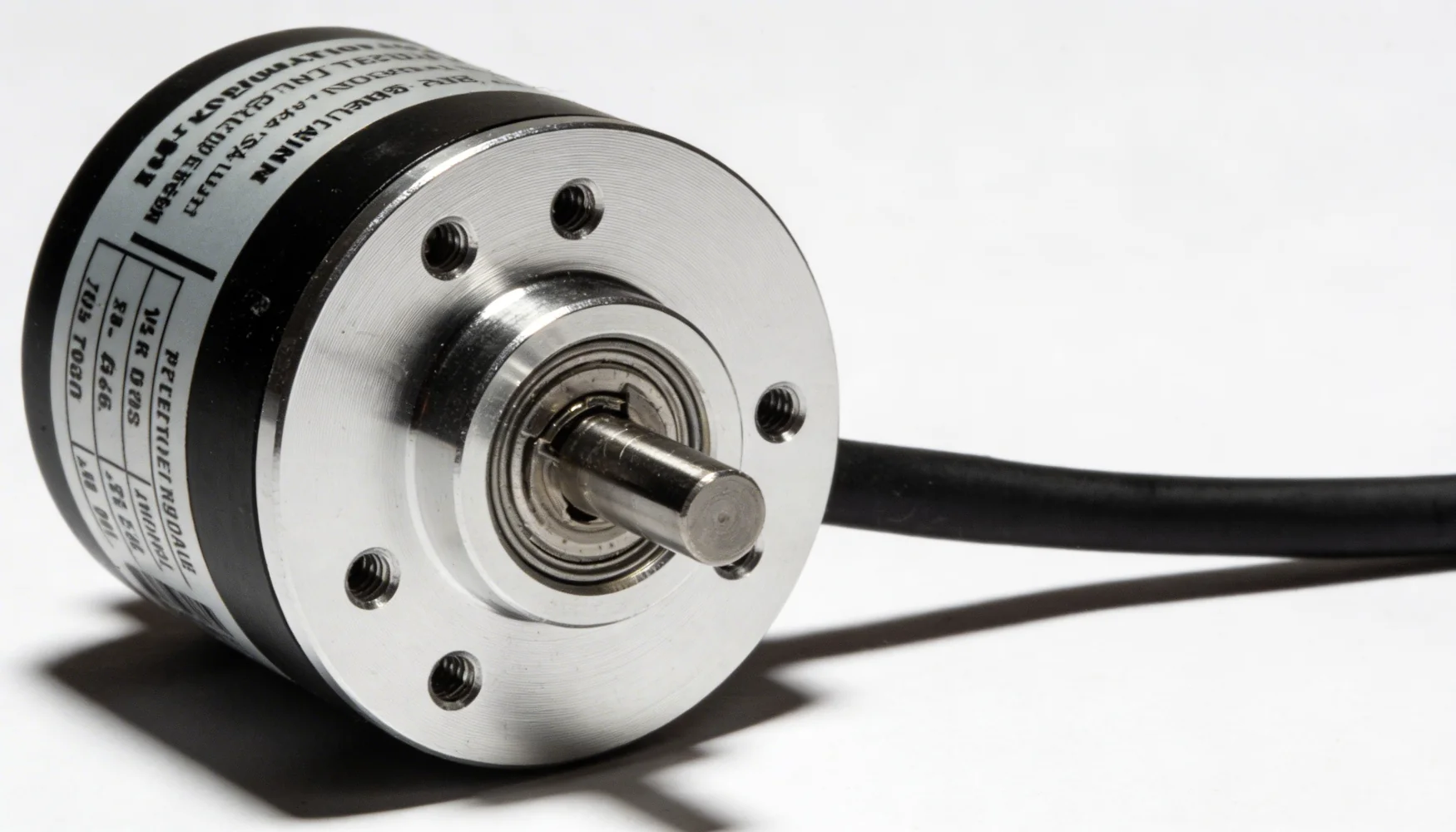
W świecie precyzyjnego sterowania numerycznego, gdzie błąd rzędu kilku mikrometrów może przesądzić o odrzuceniu detalu, informacja o rzeczywistej pozycji narzędzia jest najcenniejszym zasobem systemu. Enkoder inkrementalny to kluczowy przetwornik elektromechaniczny, który pełni rolę „oczu” sterownika CNC. Zamienia on ruch obrotowy lub liniowy na serię impulsów elektrycznych, pozwalając procesorowi kontrolera ruchu na precyzyjne śledzenie przemieszczenia, prędkości oraz kierunku obrotu wału silnika. Bez tego niepozornego urządzenia, nowoczesne systemy serwonapędowe oraz zaawansowane funkcje bazowania maszyn nie mogłyby istnieć, a obróbka skrawaniem pozostałaby w erze manualnych pokręteł i mechanicznych ograniczników. Zachęcamy do zapoznania się z poniższym artykułem, w którym przedstawimy działanie i zastosowanie tych urządzeń.
Budowa typowego obrotowego enkodera inkrementalnego opiera się na precyzyjnym układzie optycznym lub magnetycznym zamkniętym w szczelnej obudowie. W wariancie optycznym, który dominuje w aplikacjach o wysokiej rozdzielczości, sercem urządzenia jest szklana lub plastikowa tarcza kodowa zamocowana na wale. Na tarczy naniesione są mikroskopijne, naprzemienne pola przezroczyste i nieprzezroczyste, ułożone w koncentryczne ścieżki. Z jednej strony tarczy znajduje się źródło światła (zazwyczaj dioda LED), a z drugiej – matryca fotodetektorów. Podczas obrotu wału, wirująca tarcza cyklicznie przerywa wiązkę światła, co generuje na wyjściu fotodetektora sygnał elektryczny o przebiegu zbliżonym do sinusoidalnego lub prostokątnego. Precyzja wykonania tarczy bezpośrednio determinuje rozdzielczość enkodera, czyli liczbę impulsów przypadających na jeden pełny obrót (PPR – Pulses Per Revolution).
Sam fakt zliczania impulsów pozwoliłby jedynie na określenie przebytej drogi, ale nie kierunku ruchu. Dlatego enkodery inkrementalne wykorzystują dwa kanały wyjściowe, oznaczone jako A i B, których sygnały są względem siebie przesunięte w fazie o 90 stopni elektrycznych. To zjawisko nazywane jest kwadraturą. Dzięki niemu sterownik ruchu (np. CSMIO/IP) może przeanalizować, które zbocze sygnału (narastające czy opadające) pojawia się jako pierwsze. Jeśli kanał A wyprzedza kanał B, oznacza to obrót w prawo; jeśli sytuacja jest odwrotna – wał kręci się w lewo. Dodatkowo, technika kwadraturowa pozwala na elektroniczne czterokrotne zwiększenie rozdzielczości pomiarowej poprzez zliczanie wszystkich zboczy obu sygnałów (tzw. tryb x4), co drastycznie poprawia precyzję pozycjonowania bez zmiany fizycznej tarczy enkodera.
Trzecim, niezwykle istotnym sygnałem generowanym przez enkoder inkrementalny, jest sygnał Index, oznaczany często literą Z lub I. W przeciwieństwie do kanałów A i B, sygnał Index pojawia się tylko raz na pełny obrót wału i ma postać bardzo krótkiego impulsu. Pełni on funkcję absolutnego punktu odniesienia wewnątrz jednego obrotu. W profesjonalnych systemach CNC sygnał ten jest wykorzystywany do tzw. bazowania na indeks (Homing to Index). Proces ten polega na tym, że maszyna najpierw najeżdża na czujnik zbliżeniowy (bazujący), a następnie powoli szuka najbliższego impulsu Index z enkodera. Pozwala to na wyeliminowanie błędu wynikającego z histerezy mechanicznego czujnika i uzyskanie powtarzalności bazowania rzędu ułamków mikrometra, co jest kluczowe po każdym restarcie zasilania maszyny.
W środowisku przemysłowym, gdzie kable sygnałowe przebiegają obok silnych źródeł zakłóceń (falowniki, przewody zasilające silniki), czystość sygnału z enkodera jest stale zagrożona. Dlatego w profesjonalnych maszynach CNC stosuje się enkodery z wyjściem typu Line Driver (standard RS422). W takim rozwiązaniu każdy kanał (A, B, Z) przesyłany jest parą przewodów w formie sygnału różnicowego (np. A i negacja A). Kontroler ruchu analizuje różnicę napięć między nimi, co pozwala na niemal całkowite odfiltrowanie szumów elektromagnetycznych, które indukują się w obu przewodach jednocześnie. Jest to standard bezwzględnie wymagany przy współpracy z kontrolerami CSMIO/IP, jeśli chcemy uniknąć błędów pozycjonowania i nieplanowanych zatrzymań maszyny wynikających z "zaśmiecenia" linii transmisyjnej.
Prawdziwa moc enkodera inkrementalnego ujawnia się w układzie zamkniętej pętli sprzężenia zwrotnego (Closed Loop). W systemie tym kontroler ruchu wysyła komendę przesunięcia (np. o 100 mm), a następnie w czasie rzeczywistym odczytuje dane z enkodera, sprawdzając, czy fizyczny ruch odpowiada zadanemu. Jeśli pod wpływem dużego oporu skrawania silnik zacznie zostawać w tyle, system sterowania natychmiast wykryje błąd uchybu (following error) i podejmie próbę korekty, zwiększając moment obrotowy silnika. W systemach serwonapędowych enkoder pozwala również na precyzyjną kontrolę prędkości obrotowej, co przekłada się na stabilność procesu skrawania i idealną jakość wykończenia powierzchni detalu. Bez informacji zwrotnej z enkodera, każda kolizja lub przeciążenie kończyłoby się niezauważonym błędem wymiarowym obrabianego elementu.

Dobór odpowiedniej rozdzielczości enkodera to jeden z najważniejszych etapów projektowania napędu CNC. Zbyt niska rozdzielczość umożliwia płynną pracę przy małych prędkościach i ograniczy dokładność pozycjonowania. Z kolei zbyt wysoka rozdzielczość przy bardzo szybkich obrotach może wygenerować częstotliwość impulsów przekraczającą możliwości pasma wejściowego kontrolera. Nowoczesne enkodery oferują rozdzielczości od kilkuset do nawet kilkudziesięciu tysięcy impulsów na obrót (co po kwadraturowym mnożeniu daje setki tysięcy pozycji). Przykładowo, przy śrubie kulowej o skoku 5 mm i enkoderze 2500 PPR (10 000 po mnożeniu x4), teoretyczna rozdzielczość systemu wynosi 0,0005 mm, co pozwala na swobodną pracę w tolerancjach mikrometrycznych, typowych dla zaawansowanej budowy form i matryc.
Choć enkodery optyczne królują pod względem rozdzielczości, w ekstremalnie trudnych warunkach (duże wibracje, ryzyko zanieczyszczenia olejem) coraz częściej stosuje się enkodery inkrementalne magnetyczne. Zamiast szklanej tarczy, wykorzystują one namagnesowany pierścień i czujniki Halla lub układy magnetorezystywne. Są one niezwykle odporne na wstrząsy i mogą pracować w środowisku, które dla precyzyjnej optyki byłoby zabójcze. Choć historycznie oferowały mniejszą rozdzielczość, współczesne układy interpolacyjne wewnątrz enkoderów magnetycznych pozwalają im na skuteczną rywalizację z modelami optycznymi w większości standardowych zastosowań CNC, takich jak osie ploterów frezujących czy tokarek rzemieślniczych.
Nawet najlepszy enkoder nie spełni swojej roli, jeśli zostanie nieprawidłowo zamontowany. Kluczowym elementem jest połączenie wału enkodera z wałem silnika lub śruby. Musi ono być sztywne obrotowo, ale jednocześnie pozwalać na kompensację mikroskopijnych niewspółosiowości. Służą do tego specjalistyczne sprzęgła enkoderowe (mieszkowe lub kłowe o wysokiej sztywności). Zastosowanie zwykłego, elastycznego wężyka może wprowadzić błąd pozycjonowania wynikający ze skręcania się połączenia, co objawia się "pływaniem" wymiarów podczas zmian kierunku ruchu. Równie istotne jest dbanie o czystość złączy i unikanie gwałtownych uderzeń w wał enkodera, gdyż tarcze optyczne, zwłaszcza szklane, są niezwykle kruche i podatne na pęknięcia.
Wybierając enkoder do współpracy z produktami CS-Lab, warto zwrócić uwagę na maksymalną częstotliwość wejściową kontrolera. Systemy CSMIO/IP-S oferują bardzo wysokie pasmo przenoszenia sygnałów z enkoderów, co pozwala na stosowanie napędów o wysokiej rozdzielczości przy zachowaniu dużych prędkości obrotowych. Dzięki zaawansowanym funkcjom diagnostycznym w oprogramowaniu simCNC, użytkownik może podejrzeć licznik impulsów w czasie rzeczywistym, co jest nieocenioną pomocą podczas uruchamiania maszyny i weryfikacji poprawności działania układu sprzężenia zwrotnego. Stabilność odczytu tych danych decyduje o tym, czy maszyna będzie pracować płynnie, czy też będzie wpadać w niekontrolowane drgania wynikające z błędnych danych pozycyjnych.
Enkoder inkrementalny to urządzenie, które dokonało rewolucji w automatyzacji procesów wytwórczych. Dzięki swojej zdolności do błyskawicznego raportowania zmian pozycji, umożliwił budowę maszyn pracujących szybciej, dokładniej i w sposób w pełni przewidywalny. Stanowi on pomost między światem fizyki ruchu a światem algorytmów sterujących. Dla każdego konstruktora i użytkownika maszyn CNC, głęboka wiedza na temat działania, podłączenia i diagnostyki enkoderów jest niezbędna do budowy systemów, które nie tylko pracują wydajnie, ale przede wszystkim gwarantują najwyższą jakość produkowanych detali przez wiele lat eksploatacji.
Podobne artykuły
Komentarze
W naszym serwisie możesz złożyć zapytanie do wielu firm.
Zapytanie możesz wysłać bezpośrednio do firmy lub o wybrany produkt a nawet całą kategorię produktów.
Poniżej w kilku krokach pokazujemy jak wysłać zapytanie.

1. Skorzystaj z wyszukiwarki wpisując czego szukasz.
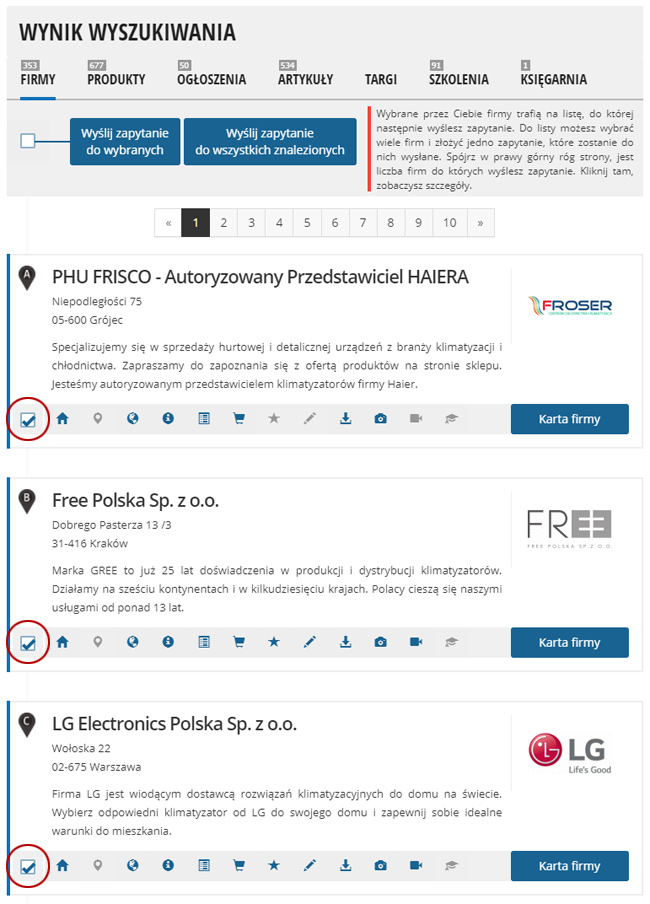
2. Zaznacz na liście wyniku wyszukiwania wybrane pozycje.
Możesz także wejść bezpośrednio do katalogu firm lub katalogu produktów i dokonać wyboru.

3. Twój wybór będzie pokazany w górnym pasku portalu. Najedź myszką i kliknij.
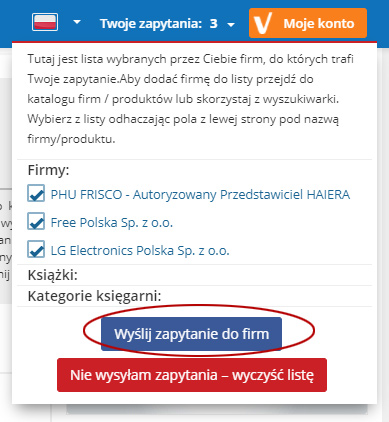
4. Następnie kliknij przycisk „Wyślij zapytanie do firm”.
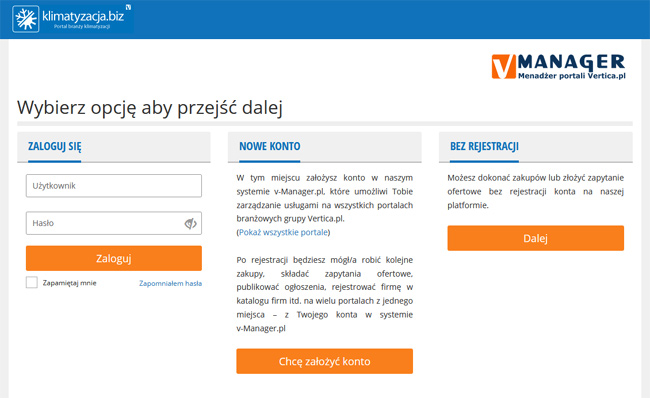
5. Jeżeli nie jesteś zalogowany to włączy się strona z możliwością wyboru w jaki sposób chcesz korzystać z serwisu.
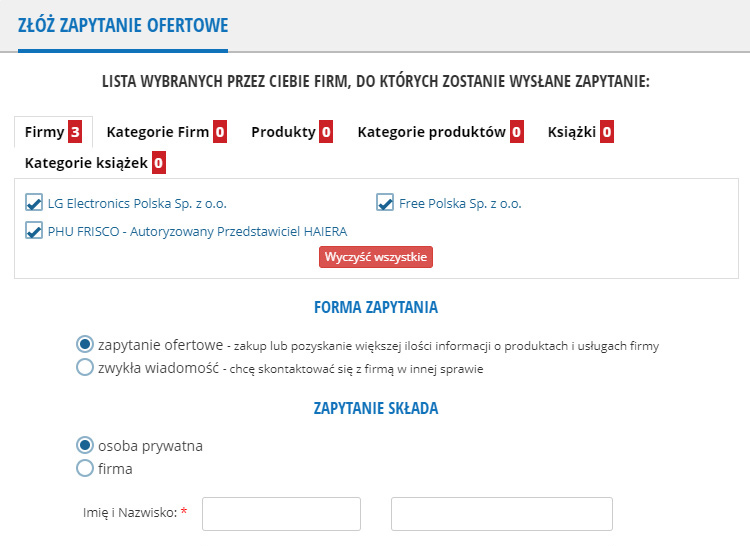
6. Włączy się formularz składania zapytania.
Miejsca, do których składasz zapytania zostały podzielone na zakładki. Na czerwono podświetlone są liczby wybranych firm, produktów itd. Tutaj możesz jeszcze dokonać zmian wyboru.
Wpisz swoje zapytanie, podaj dane kontaktowe i wyślij.
7. My roześlemy Twoje zapytanie do wybranych przez Ciebie firm, a Ty czekaj na odpowiedzi.
8. Chcesz złożyć zapytanie? Kliknij tutaj i wpisz czego szukasz.














